Ve volném časem se věnuju různým věcem a jedna z nich je hraní s Golangem a frameworkem pro IoT Gobot a GoCV.
Gobot umí pracovat s mnoha zařízeními, já si hraju s dronem Tello. Dron má 5Mpx kameru a můžete ho ovládat přes wifi. Protokol pro ovládání je celkem jednoduchý. Můžete používat ho přes UDP a to buď v ASCII nebo binárně.
Tady je jednoduchý příklad, kde drone vzlétne a po chvíli přistane.
package main
import (
"log"
"net"
)
func main() {
conn, err := net.ListenPacket("udp", ":0")
if err != nil {
log.Fatal(err)
}
defer conn.Close()
dst, err := net.ResolveUDPAddr("udp", "192.168.10.1:8889")
if err != nil {
log.Fatal(err)
}
_, err = conn.WriteTo([]byte("command"), dst)
if err != nil {
log.Fatal(err)
}
_, err = conn.WriteTo([]byte("takeoff"), dst)
if err != nil {
log.Fatal(err)
}
_, err = conn.WriteTo([]byte("land"), dst)
if err != nil {
log.Fatal(err)
}
}
nebo můžete použít netcat
$ echo -n "command" | netcat -u 192.168.10.1 8889
$ echo -n "takeoff" | netcat -u 192.168.10.1 8889
$ echo -n "land" | netcat -u 192.168.10.1 8889
pokud použijeme Gobot, kód vypadá takto:
package main
import (
"fmt"
"time"
"gobot.io/x/gobot"
"gobot.io/x/gobot/platforms/dji/tello"
)
func main() {
drone := tello.NewDriver("8888")
var flightData *tello.FlightData
var battery int8
work := func() {
drone.TakeOff()
drone.On(tello.FlightDataEvent, func(data interface{}) {
flightData = data.(*tello.FlightData)
battery = flightData.BatteryPercentage
fmt.Println("Height:", flightData.Height)
})
gobot.After(5*time.Second, func() {
fmt.Println("Battery:", battery)
drone.Land()
})
}
robot := gobot.NewRobot("tello",
[]gobot.Connection{},
[]gobot.Device{drone},
work,
)
robot.Start()
}
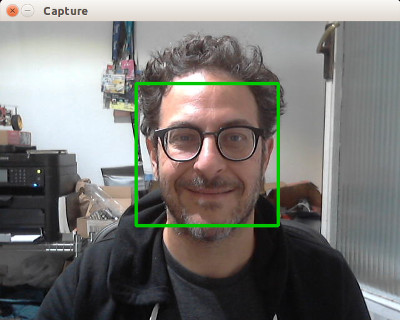
Drone umí pracovat s videm a já to používám na práci s OpenCV knihovnou. Používam detekci zmíněnou tady Face detection kde se použije externí CascadeClassifier - soubor s modelem, který se použije. Program pracuje s každým snímkem a klasifikátor se použije k detekci tváře. Pokud najde tvář, nakreslí zelený obdelník kolem každé jak je vidět na obrázku:
kód kombinuje GoCV (wrapper kolem OpenCV) a GoBot.
/*
You must have ffmpeg and OpenCV installed in order to run this code. It will connect to the Tello
and then open a window using OpenCV showing the streaming video.
How to run
go run examples/tello_opencv.go
*/
package main
import (
"fmt"
"image"
"image/color"
"io"
"os/exec"
"strconv"
"time"
"gobot.io/x/gobot"
"gobot.io/x/gobot/platforms/dji/tello"
"gocv.io/x/gocv"
)
const (
frameX = 400
frameY = 300
frameSize = frameX * frameY * 3
)
func main() {
drone := tello.NewDriver("8890")
window := gocv.NewWindow("Tello")
xmlFile := "haarcascade_frontalface_default.xml"
ffmpeg := exec.Command("ffmpeg", "-hwaccel", "auto", "-hwaccel_device", "opencl", "-i", "pipe:0",
"-pix_fmt", "bgr24", "-s", strconv.Itoa(frameX)+"x"+strconv.Itoa(frameY), "-f", "rawvideo", "pipe:1")
ffmpegIn, _ := ffmpeg.StdinPipe()
ffmpegOut, _ := ffmpeg.StdoutPipe()
work := func() {
if err := ffmpeg.Start(); err != nil {
fmt.Println(err)
return
}
drone.On(tello.ConnectedEvent, func(data interface{}) {
fmt.Println("Connected")
drone.StartVideo()
drone.SetVideoEncoderRate(tello.VideoBitRateAuto)
drone.SetExposure(0)
gobot.Every(100*time.Millisecond, func() {
drone.StartVideo()
})
})
drone.On(tello.VideoFrameEvent, func(data interface{}) {
pkt := data.([]byte)
if _, err := ffmpegIn.Write(pkt); err != nil {
fmt.Println(err)
}
})
}
robot := gobot.NewRobot("tello",
[]gobot.Connection{},
[]gobot.Device{drone},
work,
)
// calling Start(false) lets the Start routine return immediately without an additional blocking goroutine
robot.Start(false)
// now handle video frames from ffmpeg stream in main thread, to be macOS/Windows friendly
for {
buf := make([]byte, frameSize)
if _, err := io.ReadFull(ffmpegOut, buf); err != nil {
fmt.Println(err)
continue
}
img, _ := gocv.NewMatFromBytes(frameY, frameX, gocv.MatTypeCV8UC3, buf)
if img.Empty() {
continue
}
// detect faces
// color for the rect when faces detected
blue := color.RGBA{0, 0, 255, 0}
// load classifier to recognize faces
classifier := gocv.NewCascadeClassifier()
defer classifier.Close()
if !classifier.Load(xmlFile) {
fmt.Printf("Error reading cascade file: %v\n", xmlFile)
return
}
rects := classifier.DetectMultiScale(img)
fmt.Printf("found %d faces\n", len(rects))
// draw a rectangle around each face on the original image,
// along with text identifying as "Human"
for _, r := range rects {
gocv.Rectangle(&img, r, blue, 3)
size := gocv.GetTextSize("Human", gocv.FontHersheyPlain, 1.2, 2)
pt := image.Pt(r.Min.X+(r.Min.X/2)-(size.X/2), r.Min.Y-2)
gocv.PutText(&img, "Human", pt, gocv.FontHersheyPlain, 1.2, blue, 2)
}
window.IMShow(img)
if window.WaitKey(1) >= 0 {
break
}
}
}
Pokud chcete začít si hrát s dronem, můžete použít přímo nástroje v linuxu nebo mac os x jako je netcat kdy jste schopni posílat příkazy přímo dronu pomocí síťového protokolu UDP.
Když si chcete více hrát je dobré zapojit programovácí jazyk. Jednoduchý klient pro UDP napíšete v libovolném jazyce, mi jsme na Webexpu pracovali s Javascriptem a výsledky byli pěkné.
Na práci s videem zatím nikdo nerozšířil Node.js verzi, ale určitě to půjde a časem to někdo dodělá. V Gobot frameworku to funguje, tam taky čteme video a dekodujeme ho pomocí ffmpeg a potom zpracujeme jednotlivé snímky. Například můžeme detekovat pohyb před kamerou, rozpoznat koho vidíme a detekovat, že vidíme lidi pomocí knihovny OpenCV.